
Dirtle - Die Rettungs-Schildkröte
Dirtle ist ein kompakter, geländegängiger RC-Roboter, der für Rettungseinsätze in schwer zugänglichen Umgebungen entwickelt wurde. Dank seines robusten Designs mit vier Rädern und der schildkröteninspirierten Schutzhülle kann er sich sicher durch Trümmer, enge Passagen und unebenes Gelände bewegen.
Ausgestattet mit Sensoren und Kamera erkennt Dirtle Hindernisse, lokalisiert Personen und überträgt wichtige Daten in Echtzeit an Einsatzkräfte. Ziel ist es, Rettungseinsätze schneller, sicherer und effizienter zu machen, ohne Menschen unnötig zu gefährden.

Zusammenbau des Raspberry Pi 4 sowie Installation und Einrichtung des Betriebssystems zur Vorbereitung auf den Einsatz im Fahrzeug.
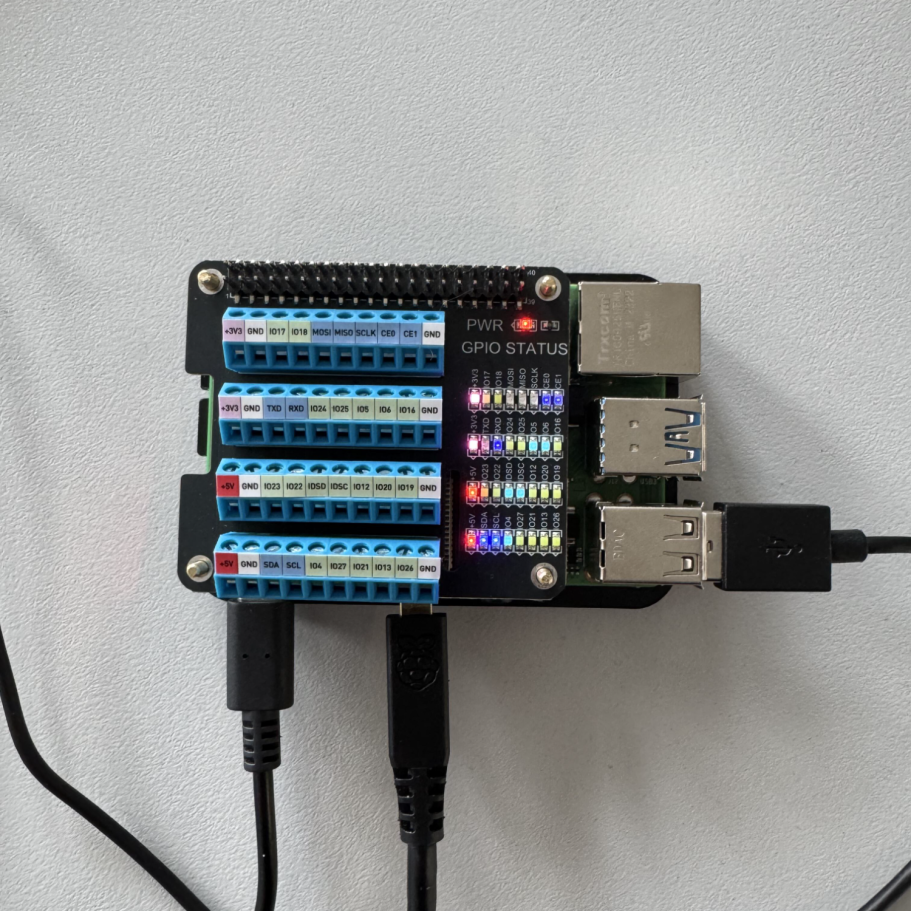
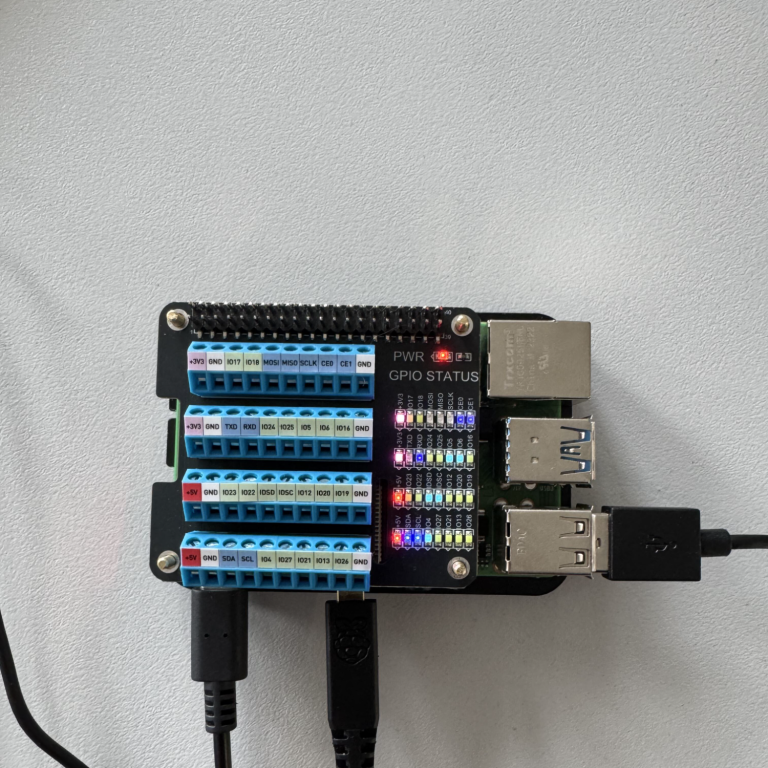
Montage des Seeed Studio GPIO Screw Terminal auf den Raspberry Pi 4, um Kabel einfacher, sicherer und übersichtlicher an die GPIO Pins anschließen zu können.
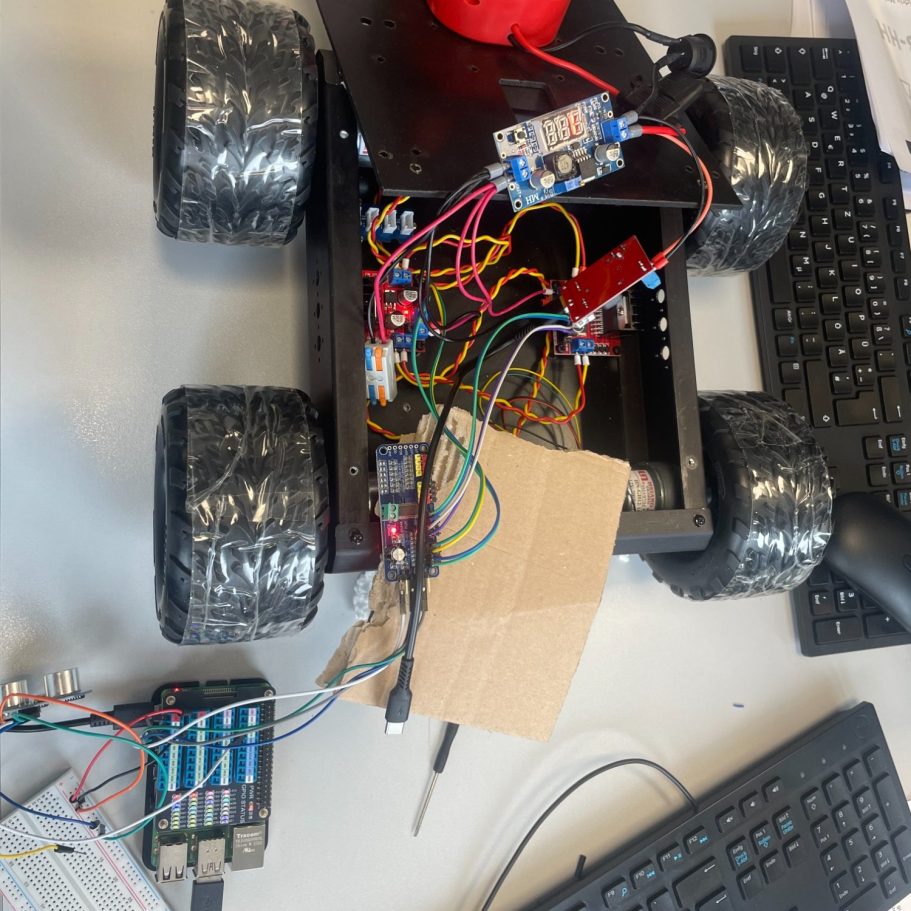
Aufbau der Verkabelung zwischen Raspberry Pi, Motoren und Infrarotsensor. Im Anschluss erfolgten erste Funktionstests der Sensorik zur Überprüfung der Signalverarbeitung und Systemintegration.
verbaut wurden ein LM2596S DC DC Step Down Modul zur Spannungsregelung, ein weiterer DC DC Step Down Converter, ein AZL298N Motortreiber, ein GRV I2C Hub sowie die vollständige Verkabelung der verbauten Komponenten.
Anschluss des PCM boards an motor controller
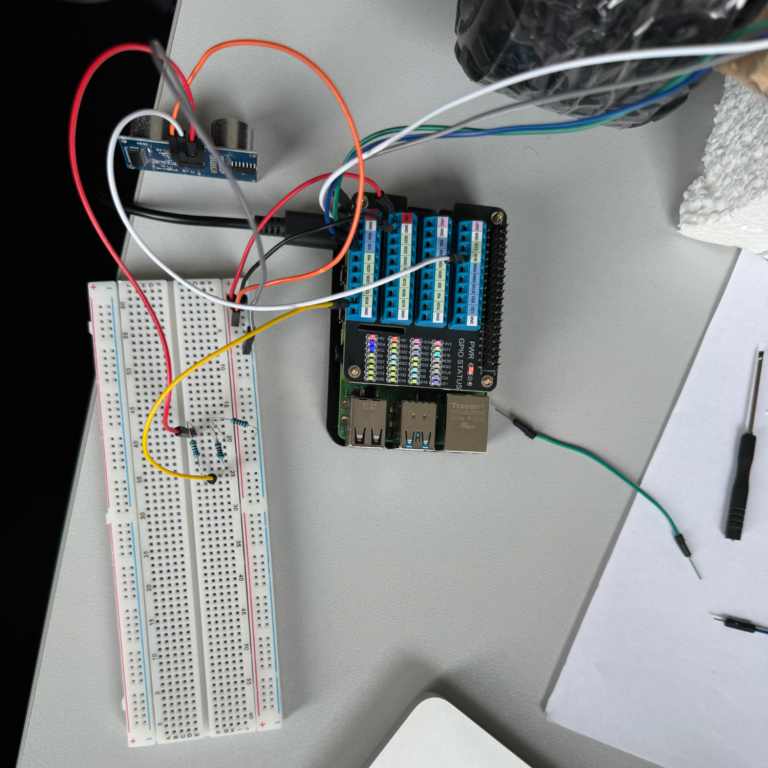
Erster test des Ultraschall Sensors zur Bestimmung von Abständen

Verlötung von drei 1 kΩ Widerständen zur Anpassung und Integration des Ultraschallsensors in die bestehende Elektronik.
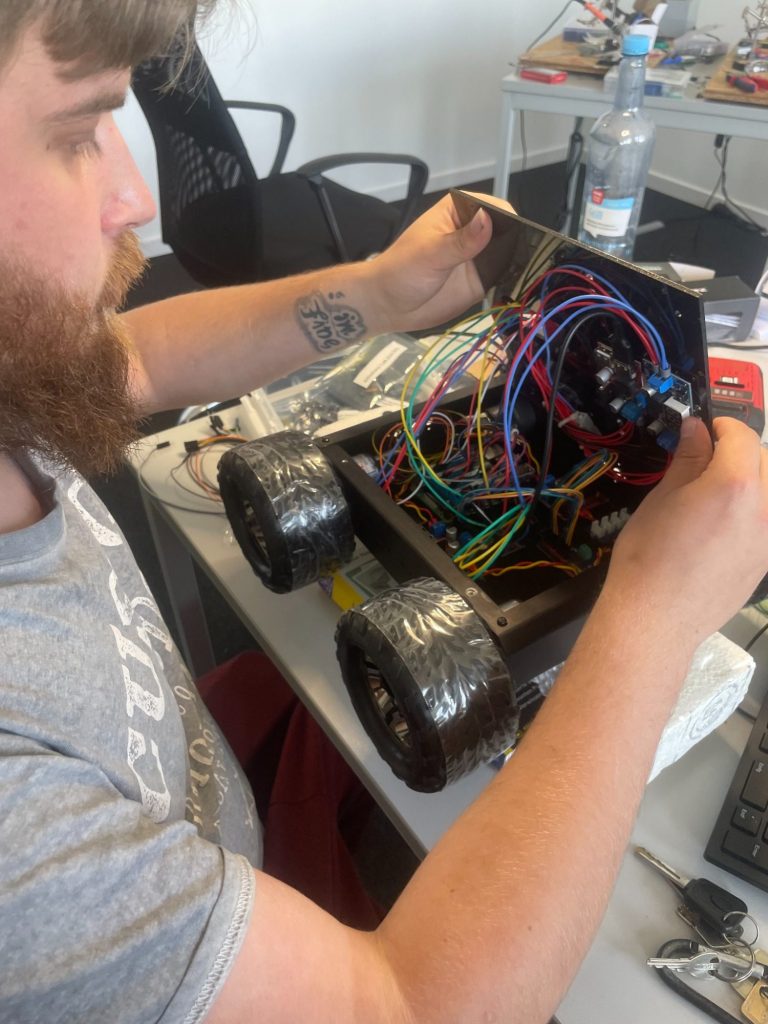
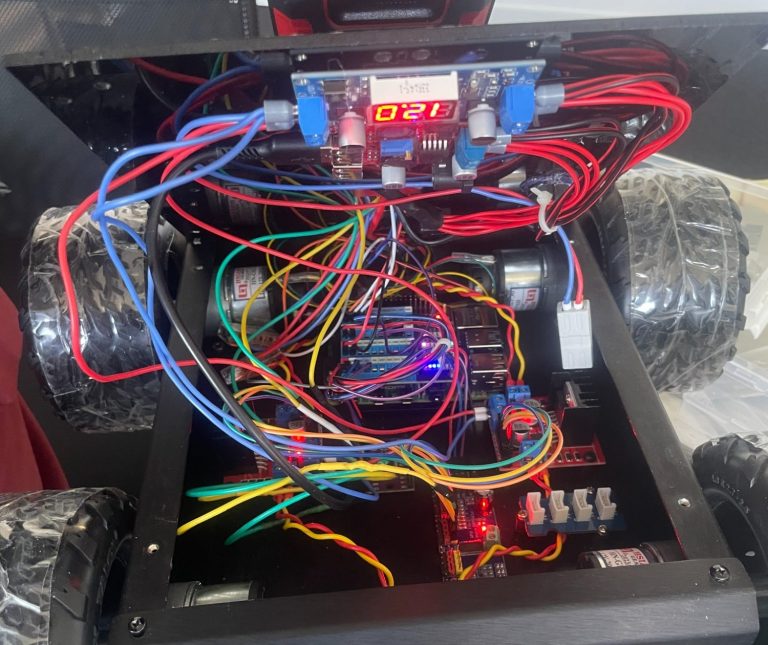
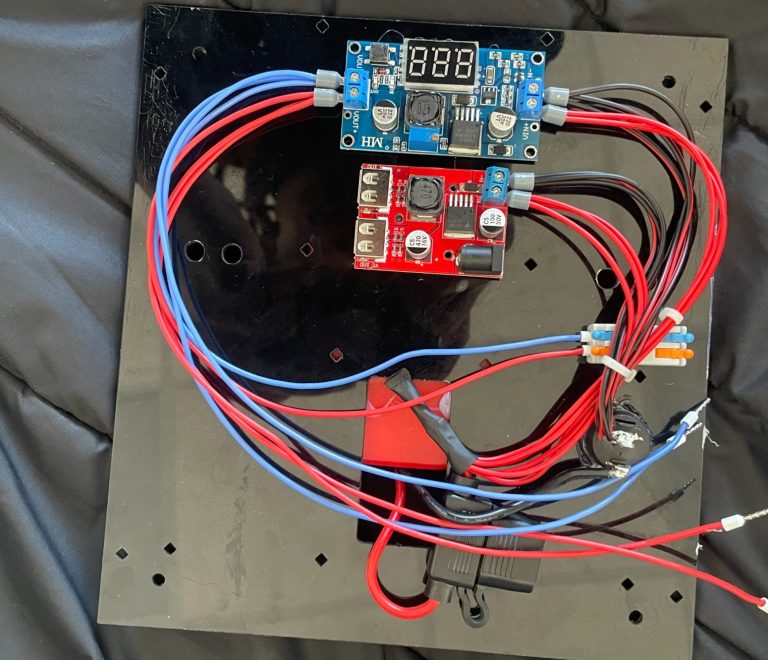
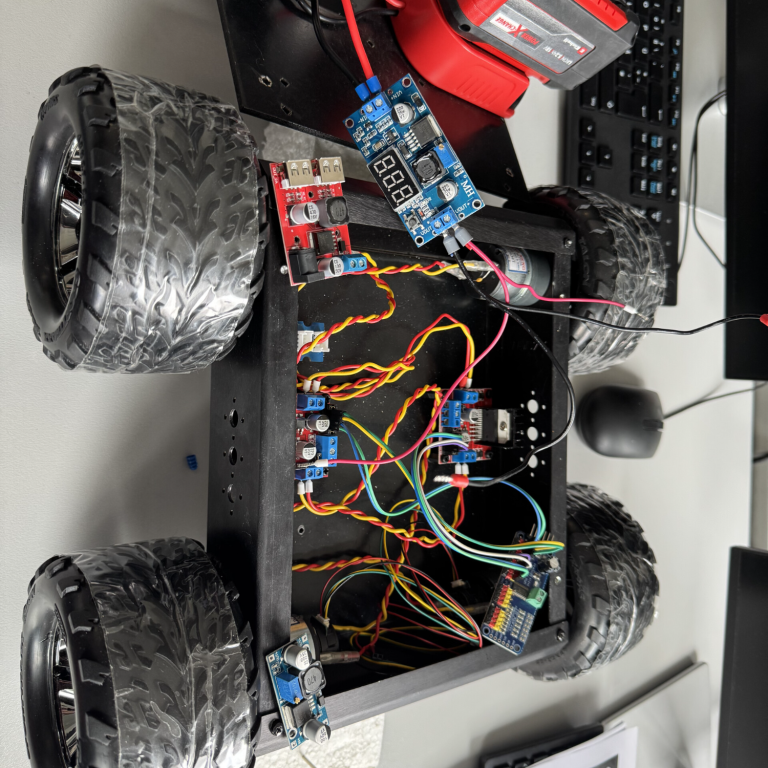
Das Herzstück des Fahrzeugs bildet ein Raspberry Pi 4 (8 GB), der alle Steuerungssignale verarbeitet. Die Stromversorgung läuft über einen Einhell Power X-Akku, dessen Spannung über zwei LM2596S Step-Down-Converter auf die benötigten Spannungen geregelt wird. Zwei AZL298N Motortreiber steuern die Antriebsmotoren, während ein PCA9685 die Servosteuerung übernimmt. Alle I2C-Komponenten sind über einen PCA9548A-Multiplexer angebunden. Das Ergebnis ist eine kompakte, vollständig selbst verdrahtete Elektronik.
Elektronik & Verkabelung
Dirtles Panzer
20x24x10
Für den Deckel unseres Rescue Fahrzeugs verwenden wir PLA Filament, da es sich gut für stabile und optisch ansprechende Bauteile eignet. Besonders die Gestaltung in Anlehnung an einen Schildkrötenpanzer lässt sich damit gut umsetzen. Für unseren Prototypen bietet das Material eine passende Festigkeit und unterstützt gleichzeitig ein robustes und funktionales Design.


Panzer Druck
Der 3D Druck unseres Panzerdeckels hat insgesamt etwa 15 Stunden gedauert. Gedruckt wurde mit PLA Filament, da es sich gut für stabile und detailreiche Bauteile eignet. Durch die lange Druckzeit konnten feine Strukturen und die charakteristische Panzeroptik sauber umgesetzt werden. Das Ergebnis ist ein robuster und gleichzeitig optisch ansprechender Prototyp, der sich ideal für unser Projekt eignet.
Viel Spaß bei den Videos
Von Visar und Konstantin :)

Die Ersten Schritte
Erste Fahrt durchs Office
Die ersten Sensor Tests
Sensorentests mit HC-SR04 und VL53L0X Laser-Distanzsensor
Erste Tests mit dem AZ Delivery HC-SR04 Ultraschall Modul
Anschluss des AZ Delivery HC-SR04 Ultraschall Moduls und erste Funktionstests zur Messung von Abständen.
Weitere Tests des AZ Delivery HC-SR04 Ultraschall Moduls
Weitere Praxistests des AZ Delivery HC-SR04 Ultraschall Moduls während der Fahrt zur Überprüfung der Abstandsmessung unter realen Bedingungen.
Kombinierte Hinderniserkennung mit HC-SR04 und VL53L0X
In diesem Versuch werden Ultraschall und Lasersensoren gemeinsam zur Hinderniserkennung eingesetzt. Der Ultraschallsensor meldet ein Objekt ab einer bestimmten Distanz, anschließend erfassen die Lasersensoren den noch verfügbaren Platz präziser. Nach dem Stopp überprüft das System den freien Raum links, um die geeignetste Fahrtrichtung zu bestimmen.
Ultraschall und Laser im Zusammenspiel
Das Fahrzeug kann Hindernisse nun frontal per Ultraschallsensor erkennen und die Entfernung zuverlässig messen. Zusätzlich erfassen Lasersensoren auf der rechten und linken Seite den verfügbaren Platz deutlich genauer. So kann das System entscheiden, ob das Fahrzeug nach rechts oder links weiterfahren soll.
Lidar - FHL-LD20
In dieser Sektion dreht sich alles um den LiDAR Sensor FHL-LD20. Von der Installation über die Verkabelung bis hin zur Inbetriebnahme.
Erste Betriebsaufnahme des LiDAR Sensors
Projektabschluss – Dirtle
Mit dem Video schließen wir unser Projekt „Dirtle" offiziell ab. Im Laufe des Projekts haben wir einen schildkrötenförmigen Rettungsroboter entwickelt, der Umgebungsdaten wie Temperatur, Luftfeuchte und Luftqualität in Echtzeit erfasst und in einer Datenbank speichert. Die gesammelten Daten werden über ein professionelles Dashboard visualisiert und ermöglichen so eine schnelle Lageeinschätzung in Rettungsszenarien. Das Projekt hat uns nicht nur technische Fähigkeiten in den Bereichen Embedded Systems, Netzwerktechnik und Datenbankanbindung vermittelt, sondern auch gezeigt, wie wichtig Teamarbeit und strukturiertes Vorgehen bei komplexen Projekten sind.